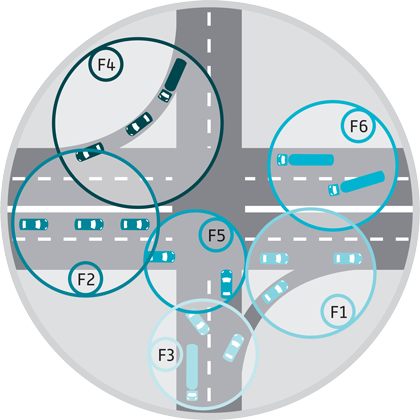
F1
In areas where lanes end or merge, drivers must change lanes under spatial and time constraints. Different tasks such as looking for a suitable gap in traffic or signalling the wish to change lanes are accomplished simultaneously in part. The high complexity of this driving task often leads to accidents at these junctions.
Based on V2X communication, IMAGinE enables the exchange of information about merging cars’ planned maneuvers and the coordination of cooperative maneuvers, for example by opening a gap in traffic for the merging car. Misinterpretations of cooperative intentions can be prevented and critical situations avoided. The range of the on-board environmental sensors is increased using V2X communication. This results in longer timespans for decision-making and coordination with other vehicles for the merging car.

F2
Current longitudinal control systems, such as Adaptive Cruise Control (ACC), use on-board sensors for detecting leading vehicles and control the distance through acceleration and deceleration. These systems are limited by their detection precision, range and latency of the deployed sensor technology.
IMAGinE is developing an approach that extends ACC in vehicles by integrating additional information about following and adjacent vehicles as well as the traffic infrastructure. For instance, situation-based traffic information can be included for setting the cruise control’s target speed limit. Vehicles can adapt their speed to the driving situation predictively and avoid unnecessary acceleration processes, mitigating critical situations or even preventing them in advance. Cooperative longitudinal control on highways via mutual coordination between vehicles additionally enables convoys to be formed in traffic jams, whereby vehicles drive in close distance at synchronized speeds.
F3
Serious collisions with oncoming traffic occur frequently on rural roads. These result from failed overtakings and evasive maneuvers, among other things. It is often impossible or insufficiently possible to recognise dangerous situations in a timely manner and evaluate the behaviour of other road users due to limited fields of view.
IMAGinE is developing technical solutions that allow vehicles to exchange information about their own trajectory and speed and about objects in the environment as well so that drivers can be warned about oncoming traffic during overtaking maneuvers. In case of a sudden danger, both the overtaking and oncoming cars contribute to accident prevention by cooperatively planning and coordinating their driving maneuvers.
F4
Individual route planning and recommendations, by navigation systems for example, usually work based on available information about distances and travel time. Local traffic infrastructure operators provide additional strategic routing recommendations. Integration of this additional information is not always possible, and sometimes the additional information is contradictory.
IMAGinE is developing an approach that aims at optimising traffic distribution in the available road network considering the given capacities. Using V2X communication, vehicles send information about traffic volume on main and side routes to a traffic centre. The traffic centre integrates data from vehicles and infrastructure and calculates an optimised traffic flow distribution before sending traffic distribution recommendations back to vehicles.
Vehicles receive the information, coordinate their intentions regarding their destinations and other routing criteria before their respective decision points, and then each vehicle calculates its own optimised route using the collective information.

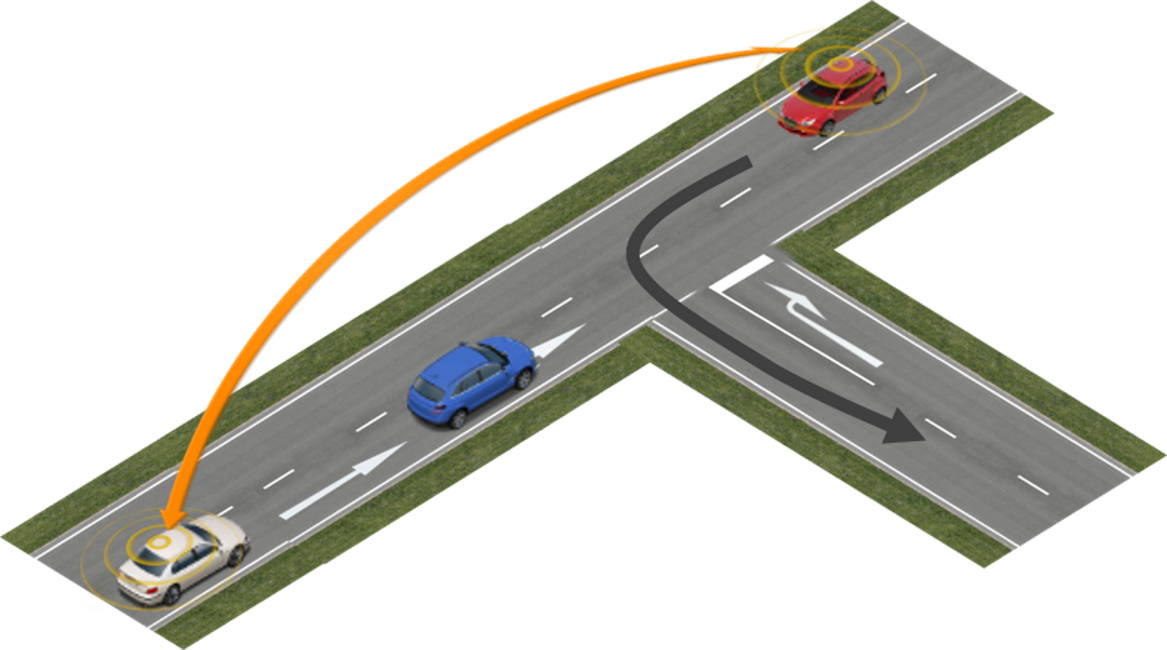
F5
Leaving a highway by a left turn and turning onto a highway are two critical and demanding driving situations where drivers need to watch for traffic coming from different directions. Current advanced driver assistant systems that support drivers in perceiving the traffic situation and executing turning maneuvers are restricted in their effectiveness by the sensor technology’s limited range. Routes with vehicles travelling at high velocities, junctions with curves and heavy fog in particular are all demanding operational scenarios.
Cooperative driving on highways is made possible through V2X communication: from transmitting turning intentions to other vehicles on the highway, thus increasing the signalling range, to collectively coordinated turning maneuvers.
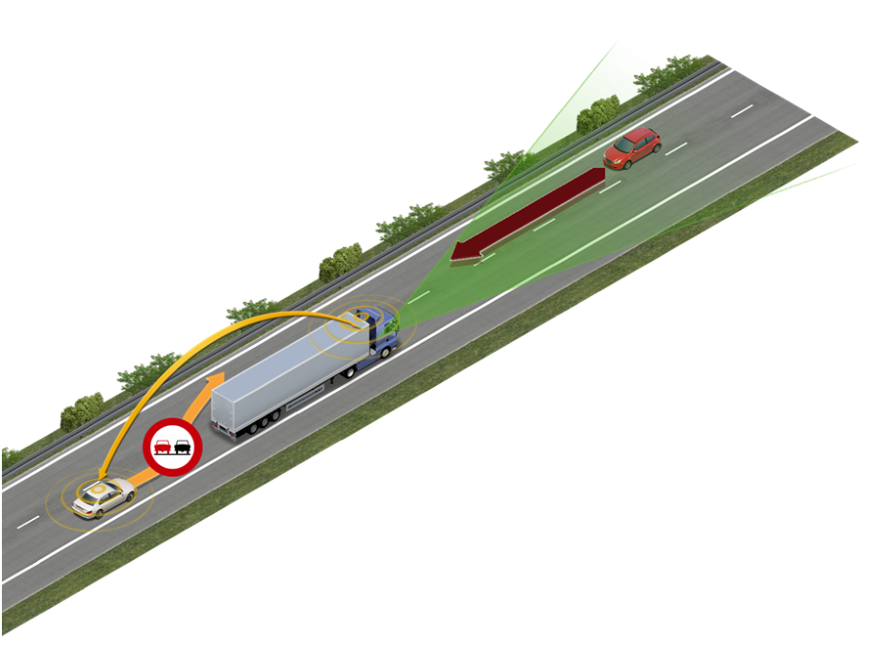
F6
Choosing the right time to pass a slow-driving vehicle is a challenging task. This is especially true for heavy-goods vehicles passing other heavy-goods vehicles on motorways. The best timing for overtaking a truck depends on the lead vehicle’s driving strategy, the ratio between its engine power and total weight, and the slope of the road.
The technological solutions IMAGinE is developing will help in finding the right timing, enabling the exchange of information between the vehicles involved in the passing maneuver about current and the planned target speeds in the near future or the weight of the heavy-goods vehicle. In heavy traffic, data about the position and velocity of adjacent traffic can also be integrated. Based on the available information, vehicles can coordinate amongst each other and make passing maneuvers more efficient and safer for following traffic.